KY-032 赤外線障害物回避センサー IRセンサーモジュール 4ピン Arduino対応 ロボットカー 電子工作用ka10000a853
¥598
残り1点
International shipping available
品番: ka10000a853
商品説明
物体検出時は出力「0」、未検出時は出力「1」となります。
出力信号はタイミングの影響を受けにくく、3Vおよび5Vのマイコン(MCU)のIOポートに直接接続可能です。
検出距離:2~40cm
長距離検出が可能で、耐干渉性に優れています。
※赤外線センサーはすべての物体を同じ距離で検出できるわけではありません。
物体の色によって反射率が異なり、黒に近いほど反射率が低いため検出距離は短くなります。
白い壁を基準とした場合、検出距離は約 2~40cm です。
応答速度が速く、以下の用途に適しています:
自律走行ロボットの障害物回避
黒白ライン追従
落下防止検出
製品カウンター
切断ライン検出
液面検出
本センサーは黒白ライン検出に対応しており、白紙上の黒ラインの追跡などに使用できます。
黒色ラインの周囲が黒より明るい色であれば検出可能で、コンクリートや黄色系の複雑な環境でも使用できます。
電源電圧:3~6V
3Vおよび5VのMCUシステムに対応しています。
EN端子の動作:
センサー未動作時:EN = 「1」
センサー動作時:EN = 「0」
ジャンパキャップを接地側に接続するとセンサーは常時動作状態になります。
ジャンパを外すとENピンによる制御が可能になります。
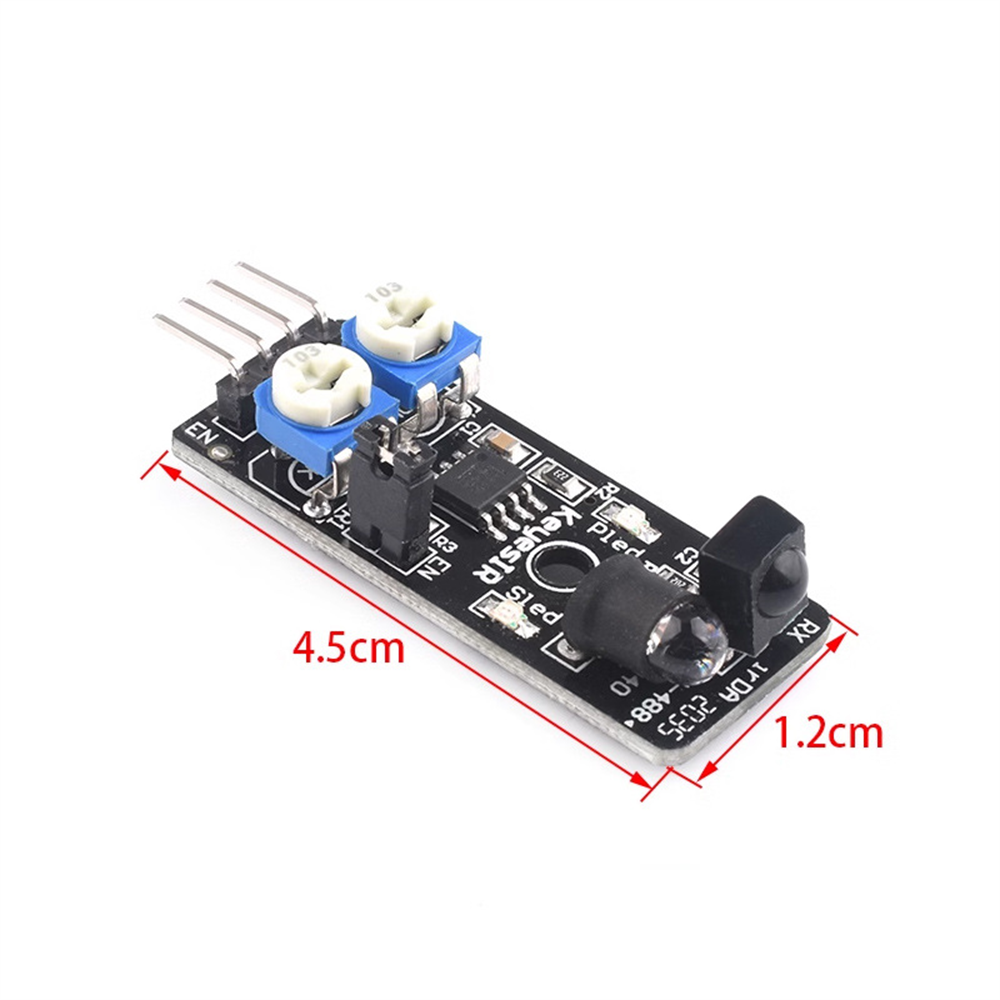
基板上の可変抵抗により赤外線発光管のキャリア周波数を調整できます。
内蔵受信モジュールは 38kHz付近で最も感度が高くなります。
調整方法:
可変抵抗(502)を時計回りに回すと発光管の輝度が最大になります。
白い壁に向けてもう一つの可変抵抗(103)を調整し、最も検出距離が長くなる位置に設定します。
これによりセンサーは最適な状態で動作します。
仕様
項目 内容
動作電圧 DC 3.3V~5V
動作電流 約20mA
動作温度 -10℃ ~ +50℃
検出距離 約2~40cm
IOインターフェース 4ピン( - / + / S / EN )
出力信号 TTLレベル
調整方式 可変抵抗調整
検出角度 約35°
基板サイズ 約4.5 × 1.1 cm
使用例
本モジュールとLEDを使用して簡単な障害物警告回路を作成できます。
障害物回避センサーを デジタル3番ピン に接続
LEDを デジタル13番ピン に接続
センサーが障害物を検出するとLEDが点灯し、
検出されない場合はLEDが消灯します。
サンプルコード説明
int Led = 13; // LED接続ピン
int buttonpin = 3; // 障害物検出センサー接続ピン
int val; // センサー入力値を保存する変数
void setup()
{
pinMode(Led, OUTPUT); // LEDを出力モードに設定
pinMode(buttonpin, INPUT); // センサー入力ピンを入力モードに設定
}
void loop()
{
val = digitalRead(buttonpin); // デジタル3番ピンの値を読み取る
if (val == HIGH) // センサーが障害物を検出した場合
{
digitalWrite(Led, HIGH); // LED点灯
}
else
{
digitalWrite(Led, LOW); // LED消灯
}
}
本製品は技術サポート・回路説明・接続方法のサポートは行っておりません。電子工作に関する基本的な知識がある方のみご購入ください。※初期不良の場合のみ交換または返金対応いたします。